About Me
Typically, people only put content about their work on their websites.
Through my years of schooling I have learned that we tend to levy our work
as the defining part of our identity. This is not necessarily a bad thing,
but I believe it is important to learn more about people than the careers and
work they have pursued. Here is my attempt to give you a little insight to
who I am.
Hello and welcome to my website! My name is Mitchell Hastings and I am from Pittsburgh, Pennsylvania! Go Steelers! I currently live in Tampa, FL doing my Ph.D. in Geophysics/Geodesy at the University of South Florida. I am an environmentalist and do my best to try and reduce my impact on the envionment. I am a vegetarian and an animal lover as well! I volunteer at the Humane Society in Tampa Bay as a dog/cat handler. I enjoy biking and running and try to get some exercise in every day (though I definitely miss some!). I will mention a little more about myself below, but for now heres a little bit into my education!
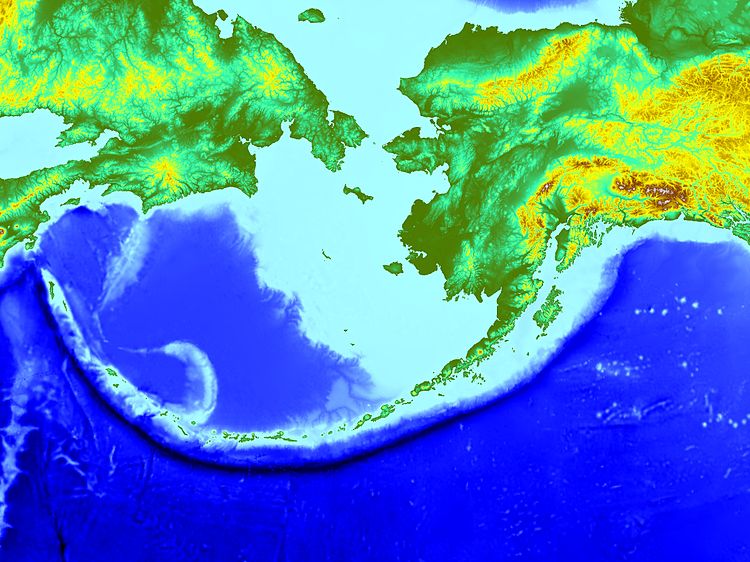
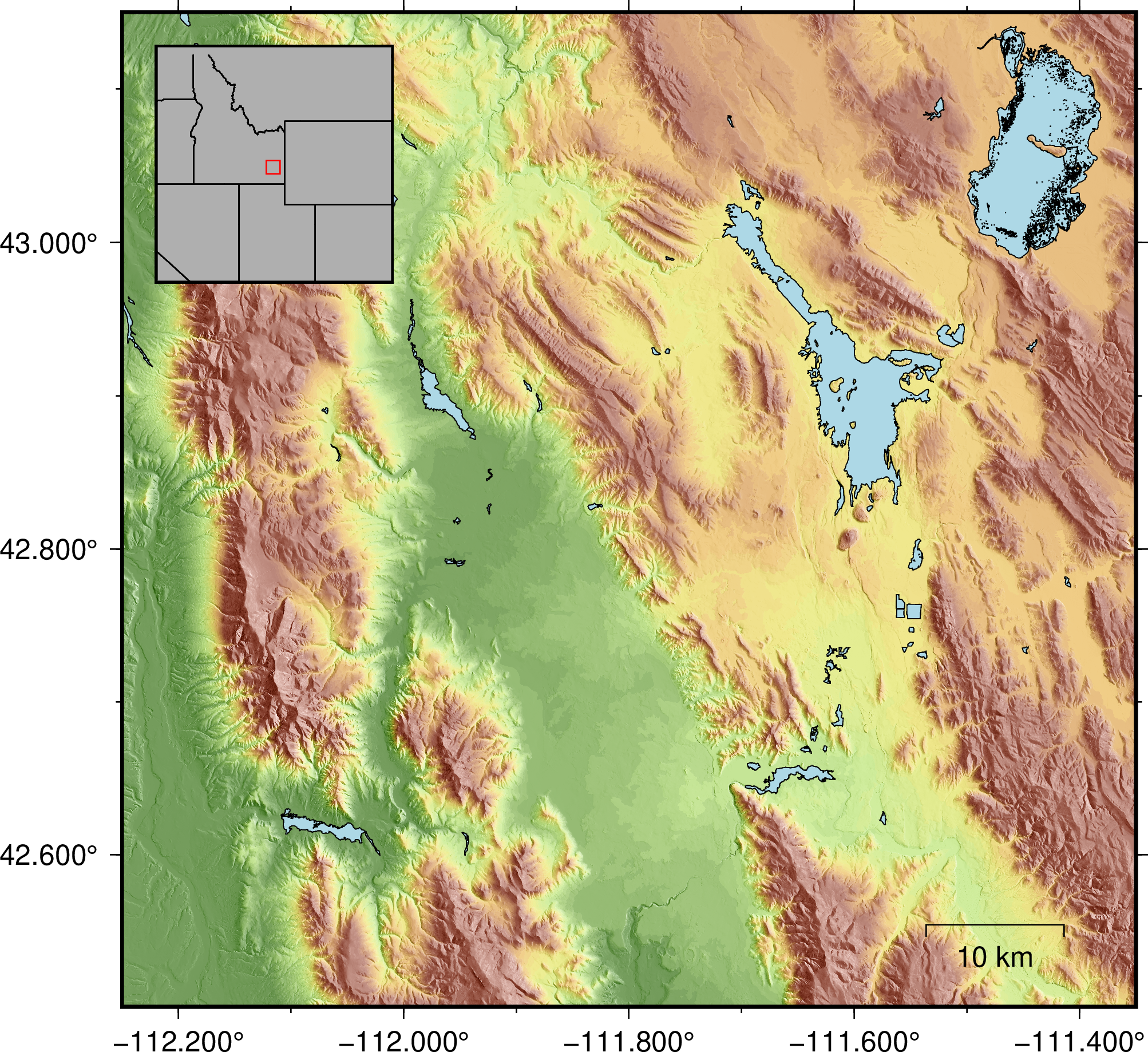
I did my undergraduate degree at Penn State originally as a physics major and in my junior year I switched into geology to pursue a physical understanding of the inner workings of the earth. In my time at Penn State I developed a passion for earthquake and volcano physics as well as computational sciences. This led me to doing an undergraduate thesis on stress changes from large earthquakes in the Aleutian Arc Subduction Zone (thesis below!). After finishing up at Penn State, I was accepted at the University of South Florida in the Fall of 2017, and since have been working on projects stretching from volcano-tectonic interactions in southeastern Idaho to strain budgets for the Central American Volcanic Arc (CAVA) Subduction Zone around Costa Rica.
Hello and welcome to my website! My name is Mitchell Hastings and I am from Pittsburgh, Pennsylvania! Go Steelers! I currently live in Tampa, FL doing my Ph.D. in Geophysics/Geodesy at the University of South Florida. I am an environmentalist and do my best to try and reduce my impact on the envionment. I am a vegetarian and an animal lover as well! I volunteer at the Humane Society in Tampa Bay as a dog/cat handler. I enjoy biking and running and try to get some exercise in every day (though I definitely miss some!). I will mention a little more about myself below, but for now heres a little bit into my education!
I did my undergraduate degree at Penn State originally as a physics major and in my junior year I switched into geology to pursue a physical understanding of the inner workings of the earth. In my time at Penn State I developed a passion for earthquake and volcano physics as well as computational sciences. This led me to doing an undergraduate thesis on stress changes from large earthquakes in the Aleutian Arc Subduction Zone (thesis below!). After finishing up at Penn State, I was accepted at the University of South Florida in the Fall of 2017, and since have been working on projects stretching from volcano-tectonic interactions in southeastern Idaho to strain budgets for the Central American Volcanic Arc (CAVA) Subduction Zone around Costa Rica.


I have many passions and hobbies that intersect my academic/professional life such as:
physics, mathematics, and programming. As such, I have been developing open source online
teaching tools to reach those that desire to learn in a new way, and to maybe show those
who are unaware how computational science can be a powerful (and fun!) tool. Below you will find
pages that present some resources on learning things like: the philosophy of programming,
python, (as my high school teacher would say) phun physics, and the basics of Unix/Linux systems.
I plan to continue expanding these resources over time and refining them to the best of my abilities!
Though many of my passions and hobbies intersect with my academic life I am a person of many interests! One that somewhat overlaps my academics is tinkering with arduinos and raspberry pis. I enjoy creating small gadgets with sensors and arduinos just to explore and extend my knowledge of engineering. On the more athletic side, I have played hockey since I was a child and will always love the feeling of being on the ice. Consequently, I am also a proud Penguins fan, it comes with being from Pittsburgh (we are a proud people). Music has also been a love of mine as well, I took piano and guitar lessons when I was younger and have continued to play/write through the years and pick up other instruments as well like the mandolin, ukulele, and violin (still working through those!). All these hobbies have left me with little free time but when I do have some I like to fill it with reading. My bookshelf comprises mostly historical fiction, mystery, and fantasy, and I do not visit it as much as I would like, but I am getting better!
Also, thank you for coming to my website and taking some time to look around!
Though many of my passions and hobbies intersect with my academic life I am a person of many interests! One that somewhat overlaps my academics is tinkering with arduinos and raspberry pis. I enjoy creating small gadgets with sensors and arduinos just to explore and extend my knowledge of engineering. On the more athletic side, I have played hockey since I was a child and will always love the feeling of being on the ice. Consequently, I am also a proud Penguins fan, it comes with being from Pittsburgh (we are a proud people). Music has also been a love of mine as well, I took piano and guitar lessons when I was younger and have continued to play/write through the years and pick up other instruments as well like the mandolin, ukulele, and violin (still working through those!). All these hobbies have left me with little free time but when I do have some I like to fill it with reading. My bookshelf comprises mostly historical fiction, mystery, and fantasy, and I do not visit it as much as I would like, but I am getting better!
Also, thank you for coming to my website and taking some time to look around!